
扫描金字塔项目:大金字塔重大发现发表在科学杂志《自然》上
至顶网CIO与应用频道 11月21日 北京消息:2015年10月启动的“埃及国际扫描金字塔”项目使用非侵入、非破坏检测方法扫描埃及金字塔,试图发现其中隐藏的秘密。经遗迹创新保护研究所(HIP)和开罗大学工程学院(Cairo Faculty of Engineering)设计和协调的这一项目是达索系统之前研究项目的延续。
在2016年10月发现横梁后的甬道起点后,“扫描金字塔项目”在著名科学杂志《自然》上撰文,揭示大金字塔(即胡夫金字塔)内存在巨大空洞并将其称为“扫描金字塔大空洞”。这个三十米长的密室在规模上与已知的“大走廊(Grand Gallery)”相似。这是一次重大发现,因为自中世纪(Middle Ages)以来就未曾在胡夫金字塔内发现过重大建筑结构。
达索系统基金会和Emissive为HIP研究所(HIP Institute)和开罗大学(Cairo University)提供技术支持和专业知识,后者借助虚拟现实体验规划和协调这一特别的多专业领域研究,栩栩如生地再现这些发现。
“扫描金字塔”是达索系统基金会选择的项目之一。基金会的目的是通过发挥3D技术和虚拟环境的强大学习与发现功能,让多专业领域团队开展共同协作,从而重新塑造未来的教育与研究。在Emissive构思和开发的精彩体验和设置的帮助下,身临其境的感觉赋予更逼真的现实感,在项目中犹如置身金字塔内。它实现协同并拓宽知识。人人(学生、研究者、公众、残疾人士等等)都能发现无法抵达的空间。
巴黎建筑设计与文化遗产博物馆(Cité de l’architecture et du patrimoine)内的虚拟现实研究实验室正在构思未来文化教育领域的协同沉浸式环境。
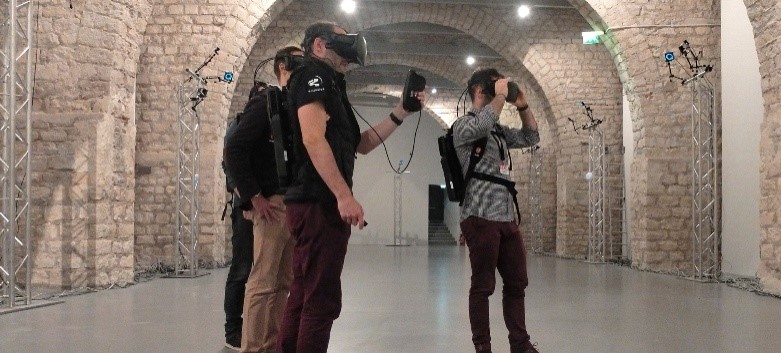

原型虚拟现实体验将研究小组置身大金字塔内,他们能在沉浸式环境中四处走动,探索这些发现。戴上虚拟现实头戴式设备,他们就进入大金字塔内部,进行一次全新的虚拟导游之旅。这是一种创新性沉浸式体验,通过前所未有的方式造访知名遗迹,它预示着文化教育活动的未来。
来源:业界供稿
好文章,需要你的鼓励


Siri AI、ChatGPT、Claude真实横评,谁才是最强AI助手?
海外博主做了一次 Siri AI、ChatGPT、Claude 横评。看完之后我最大的感受是,AI 助手的竞争已经不只是模型能力,而是谁离用户更近。

南京大学团队打造的“轻量AI视频助理“:不用反复推理,一眼就能看懂你的过去
南京大学提出Light-Omni框架,通过全局状态与潜在状态双机制,让AI视频助理无需反复推理即可实现精准记忆检索,速度提升逾12倍,准确率同步提高。

Uber年度遗失物报告揭示:数千件物品遗留在无人驾驶出租车中
Uber年度失物报告首次纳入无人驾驶出租车数据。过去一年,乘客在Uber平台的机器人出租车中遗留了数千件物品,包括手机、钥匙、钱包等常见物品,以及假牙、15磅溜溜球等奇特物件。乘客可通过App联系客服找回失物,支付15美元即可享受同城配送,或前往车辆停放站自取。Uber表示,将依托现有运营体系为自动驾驶业务提供全面支持,计划2025年底前在全球15座城市开通无人驾驶打车服务。

当AI学生卡在难题前:LinkedIn等机构如何让AI通过“偷师学艺“突破学习瓶颈
TREK方法通过引入外部验证解法对AI进行短期校准,解决了GRPO训练在困难题目上因无法探索正确解法区域而陷入瓶颈的问题,在数学推理和智能体任务上均取得明显提升。
2017
11/21
14:55
分享
点赞

Uber年度遗失物报告揭示:数千件物品遗留在无人驾驶出租车中
Uber今年将部署500辆数据采集车辆,助力自动驾驶发展
Uber、Wayve与Waymo的伦敦无人驾驶出租车大战即将开启
Mobileye计划2027年在美国推出自动驾驶出租车服务
Waymo召回近4000辆无人出租车,原因是其进入高速公路施工区域
特斯拉在奥斯汀开始测试无方向盘无踏板Cybercab量产版
图灵奖得主Patterson:摩尔定律的真相,CPU、GPU、TPU的诞生与分工
Omdia报告:Dell PowerProtect助力企业三年期网络弹性TCO最高降低61%
“驯服”千亿模型,鏖战“黑猴打瓦”,龙虾“一键接管” ,锐龙AI Max+ 395开启全能桌面AI主机“王炸”时刻
豪声电子泰国电声工厂初步投产:2500万泰铢项目进入产能爬坡
地瓜机器人将560TOPS端侧算力,加载到了20+头部团队机器人中
WAIC 2026主论坛(下午场)重磅揭晓!
