
年轻一代正在用数字化技术将科幻未来变为现实
今年的北京冬奥会上,智能机器人成为了最受瞩目的“工作人员”,承担起物流输送、交通引导、餐食制作等多种工作职能,为来自全球各地的参赛人员提供便利的生活服务,同时降低了比赛期间人员接触的频率。然而智能机器人的用途远不止这些,在2021年神舟十二号飞船进入空间站后,智能机器人又化身成为大负载、大范围转移功能的机械臂,帮助航天员完成两次出舱任务。被誉为“制造业皇冠顶端的明珠”,智能机器人的制造和应用正成为衡量一个国家科技创新和高端制造水平的重要标志。
我们正步入一个与智能科技和谐共处的新世界,人类与科技的关系也从利用、合作走向融合。在这其中,我们的年轻一代也正逐渐成长为智能技术研发的核心力量。他们研发出的具有开创性的科研成果,正在促进着人类智慧与人工智能的交互融合,帮助我们重新想象、设计和创造一个更美好的世界。
从科幻到现实,设计优化让机器人应用场景不断拓展
从1920年捷克科幻作家恰配克在《罗索姆的万能机器人》中第一次提到“Robot”开始,机器人就已经拥有了与人类密不可分的关系。作为模拟人类或其他生物行为的机械(如机器狗、机器猫等)的存在,发展至今的机器人已经成为人类代劳的绝佳帮手,机器人研发、迭代也成为全球科研最热门的论题之一。
智能机器人研发设计的第一步是原始模型的建立,也是最重要的一环,决定了机器人最终的实际功能。例如,在建立仿人机器人下肢原始模型时,首先需要参考人体下肢骨骼系统的结构和行走步态;其次根据机器人的重量和平地行走步态,通过步态仿真获得各零部件的主要受力情况。不断的参考、仿真、模拟是机器人迭代优化过程中的必经之路。
浙江大学仿人机器人团队在设计、模拟、验证的全过程中,利用数字化技术设计和创造的智能机器人便是绝佳案例之一。团队使用拓扑优化方法(加载单种工况)和Autodesk产品支持的衍生式设计(可以加载多种工况)进行结构优化设计,为了达成最贴合产品的极致设计方案,设计团队使用Autodesk产品对衍生式设计模型进行晶格结构优化,并根据晶格结构的表皮、支柱截面、节点尺寸对模型强度的影响,从这三个方面对模型细节进行修改,在达到轻量化的同时,使模型达到强度和刚度要求,加强仿人机器人的运动能力和灵活性。之后对模型进行 3D 打印仿真,验证模型的可制造性,设计小型疲劳试验机来评估机器人下肢的疲劳寿命。最终,团队制造的机器人下肢单腿质量仅为6.46kg,重量减少了54.6%,且工作电流更小,对于双足机器人的运动性能提高与减少能量消耗有着显著效果。目前,相关的论文成果《基于点阵结构的仿人机器人下肢轻量化研究》和《基于衍生式设计的双足机器人下肢结构轻量化设计及实验研究》均获得发表。
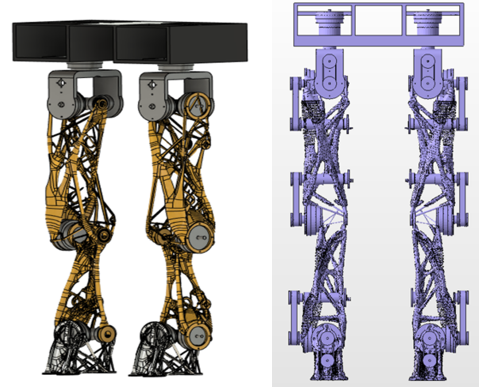
仿人机器人下肢衍生式设计结构效果图与晶格结构优化效果图
在研发和制造机器人的过程中,云台的重要性不可小觑,而设计迭代、减重和强度要求是机械设计中主要面临的3项挑战。使用传统制造方式会导致机器人云台部件多、重量大、速度慢、强度不足。华南理工大学团队另辟蹊径,使用增材制造技术,这使得机器人复杂结构的设计拥有了无与伦比的硬件自由度。而后通过Autodesk产品支持的衍生式设计技术,根据不同工况和极限条件,探索不同材料、加工方式的产品形态和性能,软件快速的设计、反馈让团队减少了80%的迭代设计研发成本。最终,团队创造出一个轻盈、快捷的机器人云台,尽管将多达27个零部件组合为一体,但最终重量仅为170克,重量减轻了42%。团队利用华曙FS271M金属激光烧结技术制造的AlSi10Mg铝合金机器人云台以其优异的机械强度、耐用性和表现,在面向世界大学生开展的全球首个射击对抗类的机器人比赛——机甲大师赛中脱颖而出,获得2019年区域锦标赛的第一名。

华南理工全国机甲大师赛获奖机器人
智能工具正在发挥科技普惠的重要价值
早在1960年,美国动态模拟研究室科学家就提出赛博格(Cyborg)的概念,人类与高科技机械工具之间的结合成为科幻小说常见的未来想象。随着人工智能发展,在2016年举办的巴西残奥会上,德国运动员丹妮斯·辛德勒更是成为首个使用3D打印假肢参加自行车比赛的奥运选手。
聚焦国内,郑州轻工业大学在脊柱侧弯患者外骨骼的生成设计与仿真项目中,进行了独特的矫正支架设计。Autodesk工业级的三维建模软件使团队的模型设计具有极高的自由度,最终使矫正支架从整片状简化为镂空根状,外观大大简化,整体的机械外骨骼也变得更加轻便,且不受人体身高的限制,实现了辅助工具与人类身体的更好结合,帮助患者更好进行康复,成果论文《Elderly Health Services and Remote Health Monitoring》已在世界上最大的科技出版社springer上出版。
机械手臂似乎已成为科幻小说和超级英雄电影中常见的装置。事实上,现实中的仿生义肢也可以为众多残疾人口带来福音。根据抽样数据统计,中国大约有2400万肢体残疾人口,但成本高、耗时长、手术并发症高成为了关键难题。欧特克展翼计划提出了解决方案,用3D打印技术为手部残障儿童提供经济、简易功能型义肢辅具。根据提交的肢残照片和数据,设计师将在3D建模软件上设计、修改模型,并利用 3D打印技术制作义肢,通过建模设计实现义肢的高度定制化,且制作简单,外形美观,并且通过手腕或肘部的弯曲传动,实现其最基本的抓握能力,同时锻炼其手部肌肉,为日后做手部矫形手术、使用高级仿生义肢提供帮助。该计划已成为创业者、3D打印平台、3D打印从业者、机械工程专业大学和学生、肢体整形外科医生、肢体残疾患儿家长的交流互助平台,并联合高校校园志愿者举办工作坊,在社交平台科普3D打印知识,力图将开源技术引入中国,完成机械及电动义肢的升级。目前展翼计划每年寄出百余只机械手,面向手部残疾儿童,提供安全、低成本、制作简易、适配性高、具有实用性的义肢解决方案。

欧特克展翼计划
数字化技术将传统产业与先进科技衔接起来,逐步走向可视化模拟、数据化预测、智能化分析以及自动化操控,这是新一轮科技革命和社会变革的焦点,也预示着人类历史上又一次新的革命已然到来。在这个新世界里,人和机器不可分割,相辅相成,由此所带来的产业和社会面貌的改变正在发生。在这样的变革浪潮中,年轻人将引领的技术创新,把科幻未来创造为现实。
来源:至顶网CIO与CTO频道
好文章,需要你的鼓励


维科精密泰国基地启动小批量生产,3.10亿元加码汽车电子精密部件
今天讲的出海案例是维科精密,这家汽车电子与功率半导体精密部件厂商正在泰国建设总投资3.10亿元的生产基地。

当AI的“记忆“在转身瞬间消失——哈佛等联合研究团队揭开视频生成模型的致命盲区
MemoBench是哈佛大学等机构联合推出的视频生成评测基准,专测AI在物体消失再重现场景下的记忆能力,揭示了当前所有主流模型的核心盲区。

pgEdge推出ColdFront,加入OLTP与OLAP融合赛道以支持AI应用
随着AI智能体对实时数据访问需求激增,企业维护独立事务与分析系统的成本和复杂性日益凸显。Databricks、Snowflake、EDB等厂商纷纷推出融合架构。分布式PostgreSQL提供商pgEdge近日发布ColdFront测试版,采用冷热数据分层架构,自动将旧数据迁移至Apache Iceberg对象存储,同时保持PostgreSQL作为唯一应用接口。分析师指出,DuckDB正成为此类架构的事实标准嵌入式分析引擎,但由此产生的集中风险值得CIO关注。

AI代码修复工具真的需要每次都“跑一遍程序“吗?北航等机构的最新研究给出了颠覆性答案
研究发现AI代码修复工具默认的"写代码→跑测试→再改"流程中,禁止运行测试几乎不影响修复成功率,却能节省超过一半的时间和费用。
2022
08/18
11:45
分享
点赞

pgEdge推出ColdFront,加入OLTP与OLAP融合赛道以支持AI应用
TabFM:面向表格数据的零样本基础模型正式发布
Netgear推出AI驱动网络管理平台,助力中小企业与服务商
旧笔记本、台式机与打印机该如何正确回收处理
美国NRC提出核废料处置新规,为长期搁置问题开辟出路
OpenClaw 智能体正式登陆 iOS 与 Android 平台
智引芯程,定义未来:德州仪器亮相 2026 慕尼黑上海电子展
“借道”MoP封装,AMD打破“存储墙”与“空间锁”
优必选万台超仿生人形机器人,要在今年进家庭?
Albertsons借助Databricks构建零售商品智能决策平台
微软正式将 Windows 11 打造为 AI 操作系统
工作中使用未授权AI工具之前,请三思
一汽大众与东研智慧出席欧特克汽车创新论坛,展现汽车行业中数字方案的应用价值
智能建设,未来已来——欧特克行业高峰会在京举办,驱动AI时代建造业数字化升级
欧特克与中国建筑西南设计研究院建立战略合作关系,以BIM技术助推工程建设行业数字化升级
欧特克与中国建筑西南设计研究院建立战略合作关系,以BIM技术助推工程建设行业数字化升级
凝创新技术,汇数字力量 欧特克数字赋能『智』造汽车高峰论坛在沪开幕
驰骋数字化转型新浪潮,欧特克与客户携手探索融合发展新可能
欧特克与普华永道展开战略合作,以配置生命周期管理解决方案驱动行业转型升级
欧特克与普华永道展开战略合作,以配置生命周期管理解决方案驱动行业转型升级
年轻一代正在用数字化技术将科幻未来变为现实
凝聚数字化技术力量,迈向可持续发展之路
