
花生壳出品蒲公英X1:解决商旅人士访问公司内网
ZD至顶网CIO与应用频道 02月21日 北京消息:出差途中需要远程办公,却怎么也连不上公司内网?作为商旅精英,这样的情况可以说只有大写的无奈了!随着越来越多的公司开始使用内部网络系统,如何随时随地访问公司内网,已经逐渐变成商旅精英共同面对的难题。不用恶补网络知识,也不用为了一个网络环境而折腾奔波,蒲公英路由器就可以为你轻松解决!
(蒲公英官网:http://pgy.oray.com/)

一般来说,要实现远程访问公司内网,传统做法需要通过设置VPN来进行实现。然而对于一般用户来讲,对VPN进行设置和维护绝非易事,这种方式也很难应用在实际商旅的环境当中。而花生壳推出的蒲公英X1路由器,就用最简单的方法解决了这个问题!只需要在公司布置任意的一台蒲公英路由器,即可轻松组网,无需专业人员,60秒两步简单设置,即可实现异地局域网轻松互联!
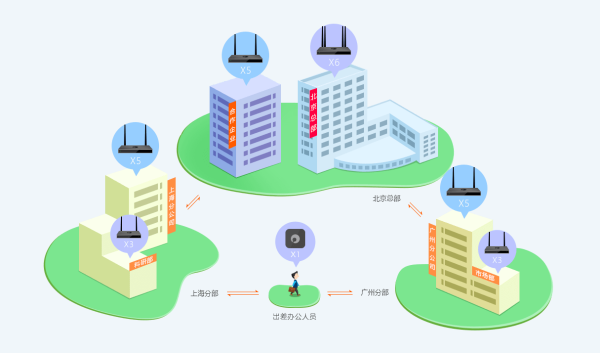
与此同时,蒲公英路X1路由器也是一台名副其实的“行走的路由器”。其从用户诉求为出发点,采用极简设计,身材小巧,一个充电宝的体积,轻松可解决远程办公难题。同时蒲公英还根据不同使用场景推出了X5、X6路由器,与蒲公英X1路由器一起,共同构建起组网路由的生态体系,使智能组网真正做到简单快捷,天涯若比邻。

只需要蒲公英X1路由器,就再也不用担心出差没法访问内网!不仅是出差,蒲公英X1路由器以“行走的路由器”之名,完全可以应对各种办公情况,实现随时享受公司内网环境,各位商旅精英们,赶紧GET起来吧!
来源:业界供稿
好文章,需要你的鼓励


Netgear推出AI驱动网络管理平台,助力中小企业与服务商
Netgear发布云端网络管理平台Insight 10.0,引入AI驱动能力,专为中小型企业(SME)和托管服务提供商(MSP)设计。新版本提供智能运维、统一可视化、简化管理及云原生架构四大核心升级,支持自动化故障排查、设备健康监控及多站点集中管理,帮助IT团队从被动响应转向主动运维,解决中小企业长期缺乏企业级网络管理工具的痛点。

北京航空航天大学研究团队揭秘:给AI代码助手加几行“路标注释“,导航效率提升了多少?
北京航空航天大学研究发现,向AI代码助手注入轻量级结构注释,可使Bug定位准确率提升2.2%,运行轮次减少1.6次,且运行结果方差减半。

旧笔记本、台式机与打印机该如何正确回收处理
许多人将旧电子设备堆放在储藏室或车库中,而非妥善处置。实际上,回收旧电脑和打印机既简单又通常免费。Best Buy、Staples等大型零售商均提供免费电子废品回收服务,每日可接收多台设备。在回收前,务必通过恢复出厂设置或专业工具彻底清除个人数据。如无零售店,可通过Earth911或消费技术协会的在线工具查找附近的回收中心。

北京大学与DP Technology联手:用135M参数模型打败十亿参数级竞争者,像素级图像生成迎来新突破
北京大学与DP Technology提出PRA框架,通过16维低维中间状态与并行解码像素输入,同时解决像素空间自回归图像生成的高维预测误差和训练推断差距两大瓶颈,135M参数超越19亿参数模型。
2017
02/21
10:04
分享
点赞

TabFM:面向表格数据的零样本基础模型正式发布
Netgear推出AI驱动网络管理平台,助力中小企业与服务商
旧笔记本、台式机与打印机该如何正确回收处理
美国NRC提出核废料处置新规,为长期搁置问题开辟出路
OpenClaw 智能体正式登陆 iOS 与 Android 平台
智引芯程,定义未来:德州仪器亮相 2026 慕尼黑上海电子展
“借道”MoP封装,AMD打破“存储墙”与“空间锁”
优必选万台超仿生人形机器人,要在今年进家庭?
Albertsons借助Databricks构建零售商品智能决策平台
微软正式将 Windows 11 打造为 AI 操作系统
工作中使用未授权AI工具之前,请三思
全球首座AI博物馆Dataland:用数据创造多感官视觉盛宴
