
工程院院士李德毅:汽车正在被软件所改变
ZD至顶网CIO与应用频道 05月18日 北京消息(文/齐丰润): 5月18日,由中国电子学会主办,ZD至顶网协办的第八届中国云计算大会在北京国家会议中心举办,中国工程院院士、中国电子学会云计算专家委员会名誉主任委员、中国大数据专家委员会顾问李德毅针对智能驾驶领域方面与与会嘉宾进行了分享。

李德毅在分享中表示:“汽车成为软件定义的机器,实现了自动驾驶,汽车,曾经被称之为改变了世界的机器正在被软件所改变。今天机器人通过大量深度学习,终于可以聪明到足以改写程序中的参数量、人工智能核心不仅仅是算法更是学习,在大数据环境下充分发挥大数据碎片化认知,客观形式的认知难度,降低形式化的难度,生成数据定义的软件,那才是围着数据转,形成数据的人工智能。”
以下是李德毅演讲实录:(以下内容根据现场速记整理,未经发言嘉宾确认,仅供参考,谢绝转载。)
各位同行各位新老朋友,我是第八次站在这个讲台上,八年的云计算给我上了两个大学,一个大学要四年的时间,现在我们该从云计算毕业了。从概念来看,技术落地,到应用繁荣,今天我就讲一个应用繁荣的例子,讲一个端设备的在云计算大数据的支持下怎么干活的。我的题目里面三个关键词,1,智能驾驶,这是跟火的。这不仅仅是汽车行业或者IT行业,是全人类要关注的事情。因为,它涉及到机器人或者是涉及到机器人的行为。2,学习或者自学习。3,程序、软件定义数据,还是数据定义软件。
去年做了一件事情,用国产的公交车和小轿车从郑州到开封,在支撑下精确导航、无人驾驶,实现了世界上第一辆大巴在郑州的道路上运行,而且全程无人干预。大家可以看看,在过红绿灯的时候,对行人不守规律的时候它是怎么处置的?这个视频网络上都有。
智能驾驶最基本的问题,好多人还没有搞清楚。到底是谁教谁?我的团队常年以来都是把装有程序的技术交给第三方,自动启动技术程序,让汽车自动开。当然了,这个程序不好,我们就有人来调整这个程序。本质上程序员通过程序教机器人开车,汽车成为软件定义的机器,实现了自动驾驶。尤其是车厂他们对自动驾驶非常喜欢,我们人非常喜欢自主驾驶或者自驾驶。汽车,曾经被称之为改变了世界的机器正在被软件所改变。
100多年来,汽车跨了3个世纪。我们看一下汽车行业都做了一些时间?一开始的时候他们关心的是轮胎、结构、车身、底盘,后来他们更加关心的是发动机、碳排放,被动安全,后来他们感觉到要零排放,新能源。最近的事情,我们更加感兴趣的是把汽车变成电动车,把原来的机械改为电控的,最后人工驾驶的车都是电子汽车。汽车电子这个词作为国际第一个标准看图线,所以汽车电子在这个里面才20年的时间。大家经常听到汽车电子,很少有人听到电子汽车,数字汽车,自动汽车,智能汽车。我们听到最多的是数码相机,傻瓜相机,智能相机,汽车变得智能化还需要时间。
人工工人驾驶时代一去不复返,将来这个社会上多一个新的人类叫做机器人。他们认为这个世界因为涉及到法规的问题,我认为没有方案是不行的。大家都认为双驾双控最好,机器人开也可以,汽车厂商干什么,他们千方百计提高传感器的性价比,把车卖出去才是他们根本王道。所以做了很多的处理芯片叫做智能芯片,讲的成本。
有一个自动停车,自动巡航。到底多少自动驾驶导航才能覆盖我们的需求?人教程序,再让程序员完成程序,让机器自动驾驶。科目越来越多,当真的把那个车买回家的时候你发现那个自动停车算了,还不出我停车。就像用的高的德导航一开始觉得挺好,对道路熟悉了,还觉得关掉就行了。自动驾驶是不太会开车的人用的,真正开车的人觉得不行,尤其是当你真正用自动驾驶的时候刚刚用上,他就说对不起,请您转入人工驾驶。所以这个问题出在哪里?归根到底发生了车祸,责任还是驾驶员的,这个人心不甘。可以看看今年发生重大事件,就是围棋怎么战胜人类的。战胜之后想提几个问题跟大家一起思考。
1,能不能让阿法狗程序再下那个棋,它是不是会有变化?这是不确定性人工智能。
2,在比赛之前或者比赛之后那个程序到底变了没有?我们现在的智能车拿到那里相比还是那个程序。
3,拿相同版本或者不同版本的阿法狗程序互相对应的话有没有什么好处?
4,不让高棋手跟他下,让棋篓子跟他下,他的棋艺会不会下降?
机器人应该有学习能力,让机器人和赛车手进行比赛。阿法狗成功在哪里?围棋目标函数哪个占的位置多,这是一个最后下完的,你试试跟围棋手下了多少程序。汽车或者改成机器人,他的目标是什么?就没有这么有力了。谁简单,谁占的数多,谁就赢。
我们仔细分一下这是人机大战的结局,并没有看到天外来客不食人间烟火的棋老。你不是天才吗,有很多计算能力吗?归根到底阿法狗围棋向人类学习。回归十年来我们参加的比赛和里程碑的实验,反反复复我们困惑过,迷茫过,试车、换平台,换模块,调参数,通过常态实验我们得出一个真理,我们认为的真理也不一定对,把这个真理打出来给你们看看,南为程序员了,程序员写程序还没有拿到驾照,今天刚刚拿到驾照,这程序员怎么写得这么好?怎么教机器人?智能车不是程序定义的机器,真正教机器人开车应该是经验驾驶员。驾驶活动是人在活动中预测控制,更多是技巧和经验而不是知识、推理和计算,经验驾驶员常年与车互动,熟练到把车融为身体一部分,成为身体无缝对接的增设外力。驾驶差异反应了个人和运动协调能力的差异,开车最后哪个小脑发达的经常开,小脑和大脑分工非常重要。小脑主要是协调能力,汽车的自动那一块。世界上没有两个完全相同的驾驶员,因此谁教谁的问题没有解决,人和机器人的驾驶和开车的时候如果悄悄自学习把驾驶员的脑转化为机器驾驶脑,并和机器行为融合在一起,这样应该让驾驶员教机器人开车,我们欣慰地看到谷歌公司请了一大批经验驾驶员开车,在认知上我们有相同点。自动驾驶根本区别在于机器人有没有向人类驾驶员在线学习的能力。谁教谁,我的观点,不是观点程序员教机器,而是有经验人的驾驶员教机器人。
学什么?学人驾驶。人的驾驶过程是一个人在回路中的预测控制。我们看看轮式机器人怎么在人在回路的时候进行控制。应对驾驶活动随时间的滚动不确定性。举个例子来说你开车刚刚是大太阳一会儿突然下雨,光照变化太大,这个事情你能够做到吗?举个例子来讲,周边突发事故随时发生,环境噪声或者对面一个车突然过来了,尤其是那个宠物从横向切过来,你能够感觉到吗?所以汽车了不起,我要向汽车人学习。
人坐在驾驶位上很舒服,速度低的时候方向盘很轻松,一个指头就拐弯了,速度高的时候方向盘起来了,这多好。让人在认知层面上定性而不是定量的设计人再回路不确定性时间滚动控制,这是汽车成功的关键。不主张简单地说智能车就是四个轮子加一部手机,这句话有问题。举个例子车子在急匆匆地赶往机场的路上,前面强光非常的刺眼,这个距离叫做可控路程,突然变小了,我只好尽快把车速减下来,什么叫做急匆匆,什么叫做强光,什么叫做猛刹?预测控制正是人工驾驶的魅力所在,智能车研发的困难不仅仅是传感器,更重要是机器驾驶脑和驾驶员一样应对不确定性,适时做预测控制,实时就是在线。
预测控制作为反被控制的策略之一,驾驶员有限之内的预测或者时间滚动以后,始终由当前预测值刷新这个问题。第一个元素形成返回空置率作为这个车,这个自动化不得了,所以光有传感器是不行的,人在开车过程中预测控制怎么发生?
这张表是我专门做的,这是为了做我们的车每小时36公里。怎么样有这个能力这个很重要,我们有一个函数计算。下面我们讲一个简单的自动控制科目自动驾驶科目叫做超车并道,正常情况下有四个红灯代表我们流量,这黄颜色是我规划轨迹我看温度够不够,所以生成超车并道的动机,我看看我的路权,路权在我路面上,我可以往前走,我目标就是这么多,所以我走了,我速度行使轨迹加一点,走了以后我路权大了,左边车辆怎么变化,我看我前面车走慢了,所以我开始换道往那边走了,我发现那个可以用的,一百毫秒作为一米,一米动14次方向盘,所以我们控制精度很细的,我走呀走呀就走完了。这是我研究生做的,我觉得他应该感觉到很欣慰,可以在大会上展示他的成果。
这个设计轨迹的规划是分布做出来的,不是一个规划做出来的,后面只是代表方向而已。还有操作过程当中中途放弃换道了我又回来了,这个事情经常发生的,当我们慢速车回到快速车流的时候经常是这个情况。红车是我车的设计轨道,我没有换道又回来了,这是超车并道不确定性。还有第三种,换道因为三号要超过它,所以还在这里。第四个一般驾驶员水平高一点,要强行超车,换道轻踩油门做一个小加速,前面车看到加油门干脆让道算了。超车并道这么一个小事情,这么驾驶科目真正设计起来还远不止这几种。因此驾驶脑中学很麻烦。
刚才讲学什么,现在讲怎么学?驾驶员学习什么?我们学习驾驶员认知的行使化。轮式机器人涉及时变、非线性、有时滞、是多约束条件下的目标优化。一个好的驾驶员安全应要高。第二个要舒适,坐的人前仰后翻的他不做。第三个耗油量低。我们采取策略是驾驶员认知、机器认知、交互认知。
我不要你做自动驾驶我全是自主多好,我们给出一个三位一体的机器认知、交互认知、驾驶员认知的方法。怎么在工作记忆里面形成驾驶态势,涵盖方向盘具体动作。再认知再行动这样一个数据的认同,所以我们认为不要老是讲计算,记忆太重要了,记忆不等于存储,记忆和计算和存储是同时发生的。
我们要将调试总线扩展为自学学总线,开创自学习板块,完成深度学习和进化学习,让抡式激起人像人一样开车,研发有个性的智能车。将经验驾驶员对油门、制动和方向盘的操控量抽象为认知箭头。因此到了机器人开车的时候叫做自驾驶,我们利用搜索引擎通过态势图、以图搜图,实时地在记忆中近似像素。形成大数据认知碎片化认知,细分的约束取件,通过大量微观认知形式化,减少形式化难度,缩小在线推理的范围。我们看看我们学习图,机器人向经验驾驶员学习开车,人生理做了一个决策,我用我驾驶态势替代驾驶员的态势,这样态势下是这样操作的,人为进行比对,首都机场假如开一个小时,一百毫秒3600个驾驶图,和3600个认知的箭头,进行深度机器学习。下一次人不在机器开车,机器形成一个驾驶图拿这个图搜索从而形成一个图,把这个图拿过来进行一个操作,现在我们谷歌也好,科达讯飞云识别都是有这个技术。人常常是在错误中学习的,吸取事故教训是提高驾驶水平的最高环节。如果我们把所有事故做到量化,当你遇到这样情况你万万不能这样操作的,好比说爆胎这个事情我作为一个典型案例。按照这样一个思想在我们驾驶脑形成双管驾车,红颜色是公路路线,绿颜色是学习路线,我们驾驶脑里面有感知板块、交互板块、学习板块、认知板块、专家专攻板块等等。这张图云凯说值一千万,我就把这一千万贡献给你们。
当你深度学习站在全球人工智能的风口,把人工神经网络用于点云图像识别、完成感知阶段的自学习,这个数据量大大少多了,在点云感知图我们才四个小时大概是10个G,到这里面是1个G,1个G就方便多了。这种深度学习的普遍应用可以有很多,你可以在路上跑一个星期,你把三环驾驶信息记录了。云计算、大数据助推并成就了人工智能。
我们看看云计算在这里面起什么作用?云感知、云认知、云交互、云学习,我们如果是驾驶脑,有了云计算这个驾驶脑变成驾驶超脑,因为可以借助全体的智慧。形式化的约束然后做模型然后做算法然后写程序,程序+数据+文档是软件,那时候我们知道数据围着程序转的,现在突然我们发现大数据了还有没有其他办法,除了由上而下,能不能程序围着数据转,用数据定义程序、数据定义算法、数据定义模型。我结论今天机器人通过大量深度学习,终于可以聪明到足以改写程序中的参数量、人工智能核心不仅仅是算法更是学习,在大数据环境下充分发挥大数据碎片化认知,客观形式的认知难度,降低形式化的难度,生成数据定义的软件,那才是围着数据转,形成数据的人工智能,谢谢大家。
(以上内容根据现场速记整理,未经发言嘉宾确认,仅供参考,谢绝转载。)
好文章,需要你的鼓励

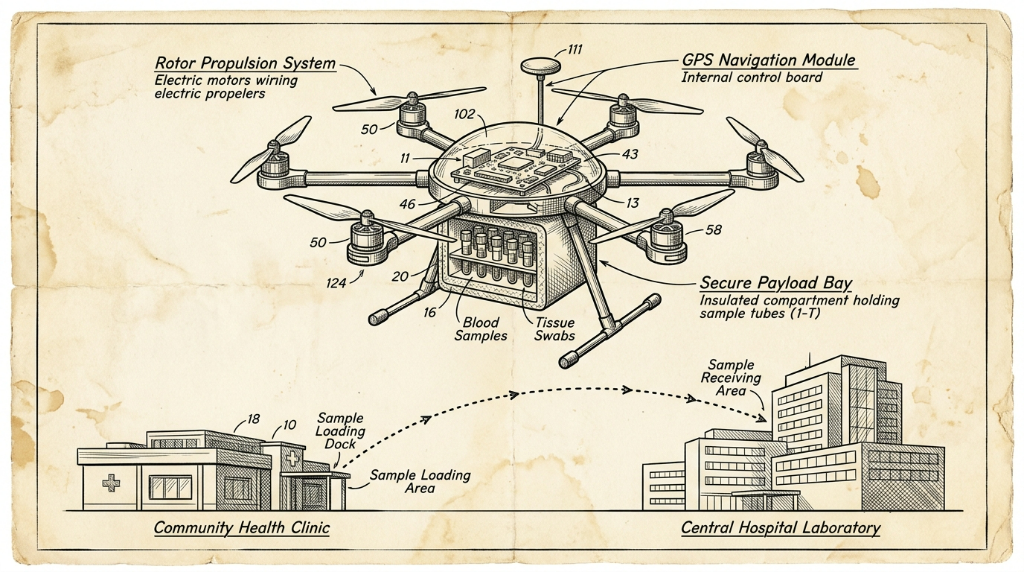
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2016
05/18
12:20
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
