
NVIDIA Jetson Nano 2GB 系列文章(29): DeepStream 目标追踪功能
在计算机视觉的应用中,“识别”只是一个相当入门的技术,相信很多人在执行深度学习推理应用中,经常产生的质疑就是“识别出的类别,有什么用途呢”?
确认每一帧图像中有多少个我们想要识别的种类,以及他们在图像中的位置,只是整个应用的第一步而已,如果缺乏“目标追踪(tracking)”的能力,就很难提供视频分析的基础功能。
在标准 OpenCV 体系里有 8 种主流的目标追踪算法,有兴趣的可以在网上搜索并自行研究。
算法的基本逻辑就是需要对视频的相邻帧进行“类别”与“位置”的比对,因此这部分的计算还是相当消耗计算资源的,也就是当视频分析软件“开启”目标追踪功能时,其识别性能必定有所下降,大家必须先有这样的认知。
DeepStream 的定位就是针对“视频分析”的应用,因此“目标追踪”是其最基本的功能之一。
在前面使用的 myNano.txt 配置文件中,只需要调整一个设定值就能开启或关闭这个追踪功能,非常简单。
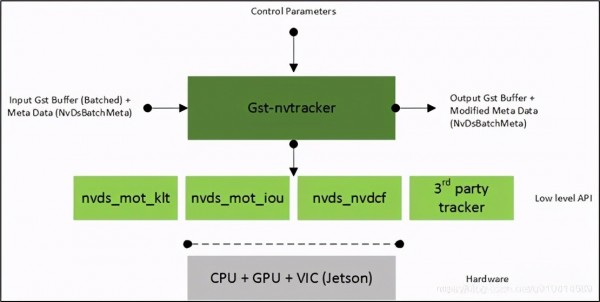
DeepStream 支持 IOU、KLT 与 NVDCF 三种目标追踪算法(如下图),其中 IOU 的性能最好,在 Jetson Nano 2GB 上的总体大约能到 200FPS;NVDCF 的精确度最高,但目前性能大约只能到 56FPS;KLT 算法目前在性能与精确度的平衡比较好,总体性也能到 160FPS,因此通常都选择 KLT 追踪器做演示。
算法的细节不多做解释,请自行寻找相关技术文件学习,这里就直接进入实验的过程。还是以前一篇文章中的 myNano.txt 配置文件为主,如果不知道的话,就用 source8_1080p_dec_infer-resnet_tracker_tiled_display_fp16_nano.txt 复制一份出来就可以,透过修改里面的参数,让大家体验一下 DeepStream 目标追踪的功能。
01
目标追踪功能的开关
在 myNano.txt 最下方,可以看到[tracker]的设定组,下面有个“enable=1”的参数,就是目标追踪的功能。
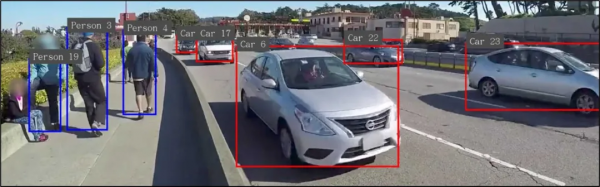
现在先执行一次启动追踪功能,如下图可以看到每个识别出的物件除了类别、标框之外,旁边还有个编号,这个编号会一直跟着该物件,这样就形成“追踪”的功能。
此时的识别性能如下图,总性能(8 个数字相加)大约 160FPS。

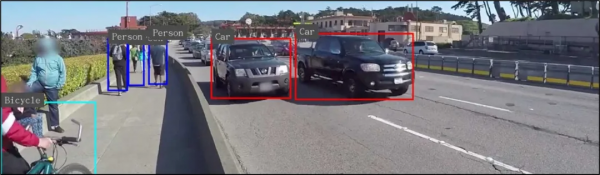
如果将[trakcer]下面改成“enable=0”,再执行看看结果如何?下图中能识别出物件的类别与标框位置,但是已经没有编号。
关闭追踪功能之后的识别性能如下图,总识别性能可以达到 250FPS 左右。

02
切换追踪器
前面说过,目前 DeepStream 5.0 支持三种追踪器,那么要如何选择呢?同样在[tracker]参数组下方,有这样的三行参数:
|
#ll-lib-file=/opt/nvidia/deepstream/deepstream-5.0/lib/libnvds_mot_iou.so #ll-lib-file=/opt/nvidia/deepstream/deepstream-5.0/lib/libnvds_nvdcf.so ll-lib-file=/opt/nvidia/deepstream/deepstream-5.0/lib/libnvds_mot_klt.so |
前面加上“#”号的就是处于关闭的状况,请先将[tracker]切回“enable=1”的开启状态,接下来请自行加减“#”的位置以切换追踪器的选择,分别测试这三个追踪器的不同之处,包括识别性能与追踪能力。
这部分必须直接在视频中体验,因此就不截屏显示。测试结果可以感受到 IOU 追踪器的性能最好,可达到 200FPS 左右,但是同一物件的编号并不是太稳定,而 NVDCF 追踪器的编号最为稳定,但性能大概只有 IOU 的 1/4,最多只能承受 2 路视频的实时分析。
KLT 算法总体性能可达到 160FPS,可以支持到8路以内的实时识别,追踪能力也比 IOU 好不少,不过这个算法对 CPU 的占用率比较高,是这个算法的主要缺点。该如何选择需要看实际的场景与计算设备的资源而定。
03
获取追踪数据
前面打开目标追踪功能的目的,并不只是为了在显示器上看看而已,而是用这些数据做更有价值的应用,而这些数据要从什么地方得到呢?通常都需要透过 Python 或 C++从 DeepStream 提供的接口去获取。
这里提供一个无需了解 DeepStream 接口就能获取目标追踪数据的方法,只要我们在 myNano.txt 里面的[application]参数组,添加一条“kitti-track-output-dir=<PATH>”的路径指向就可以,这里假设要将数据存入“/home/nvidia/track”路径下,在 myNano.txt 里添加一行参数即可:
|
[application] 。。。 。。。 kitti-track-output-dir=/home/nvidia/track |
执行“deepstream -c myNano.txt”之后,就可以看到/home/nvidia/track目录下产生非常多的文件,如下截屏:

每个文件存放“一帧”的目标追踪结果,例如我们测试的 sample_1080p_h264.mp4 视频有 48 秒,每秒有 30 帧图像,就会生成 1440 个文件。
前面 6 位数“00_000”代表视频源的编号,从“0”开始,如果有 4 路视频源就会有“00_000”~“00_003”的编号,后面 6 位则是流水号,例如这个测试视频就会生成“000000.txt”~“001440.txt”,由这两部分组合而成文件名。
最后看一下文件的内容,如下所示:

这是 KITTI 格式的数据,第一栏位是该物件的类别,第二栏是该物件的“追踪编号”,后面数据所代表的意义,请自行参考 KITTI 的格式定义。
现在我们就可以依序读入这些追踪文件,或者将这些文件回传给控制中心,进行文件解析与信息提取,这样是不是很方便?相信这些内容对于开发会很有帮助。
来源:至顶网CIO与CTO频道
好文章,需要你的鼓励



Queen‘s大学重磅研究:程序员的角色即将彻底改变,从码农到智能体指挥官
Queen's大学研究团队提出结构化智能体软件工程框架SASE,重新定义人机协作模式。该框架将程序员角色从代码编写者转变为AI团队指挥者,建立双向咨询机制和标准化文档系统,解决AI编程中的质量控制难题,为软件工程向智能化协作时代转型提供系统性解决方案。

苹果发布 iOS 26.0.1 系统更新,修复多项关键问题
苹果在iOS 26公开发布两周后推出首个修复更新iOS 26.0.1,建议所有用户安装。由于重大版本发布通常伴随漏洞,许多用户此前选择安装iOS 18.7。尽管iOS 26经过数月测试,但更大用户基数能发现更多问题。新版本与iPhone 17等新机型同期发布,测试范围此前受限。预计苹果将继续发布后续修复版本。

医疗AI的“显微镜革命“:西北工业大学团队发布首个超声影像专用智能助手EchoVLM
西北工业大学与中山大学合作开发了首个超声专用AI视觉语言模型EchoVLM,通过收集15家医院20万病例和147万超声图像,采用专家混合架构,实现了比通用AI模型准确率提升10分以上的突破。该系统能自动生成超声报告、进行诊断分析和回答专业问题,为医生提供智能辅助,推动医疗AI向专业化发展。
2021
09/14
17:36
分享
点赞

业界首款符合AEC-Q200标准额定电压高达1,000 VDC高压保险丝
数据中心的智算挑战,英特尔要如何应对?
下一代智能工厂怎么建?开放自动化给出“解题思路”
跟随西门子,在工博会感受沉浸式的工业AI体验
苹果发布 iOS 26.0.1 系统更新,修复多项关键问题
OpenAI将发布类似TikTok的社交应用,搭配Sora 2视频模型
微软推出Office智能体模式让用户"氛围办公"
AI助手现在能帮你创建高质量Word文档和Excel表格
高通新一代骁龙平台将推动智能体AI时代到来
SAPx阿里云,开启一条通往中国市场与全球化发展的全新路径
微软推出"氛围工作"模式,为Office套件加入AI智能体
OpenAI推出智能购物系统挑战谷歌亚马逊
